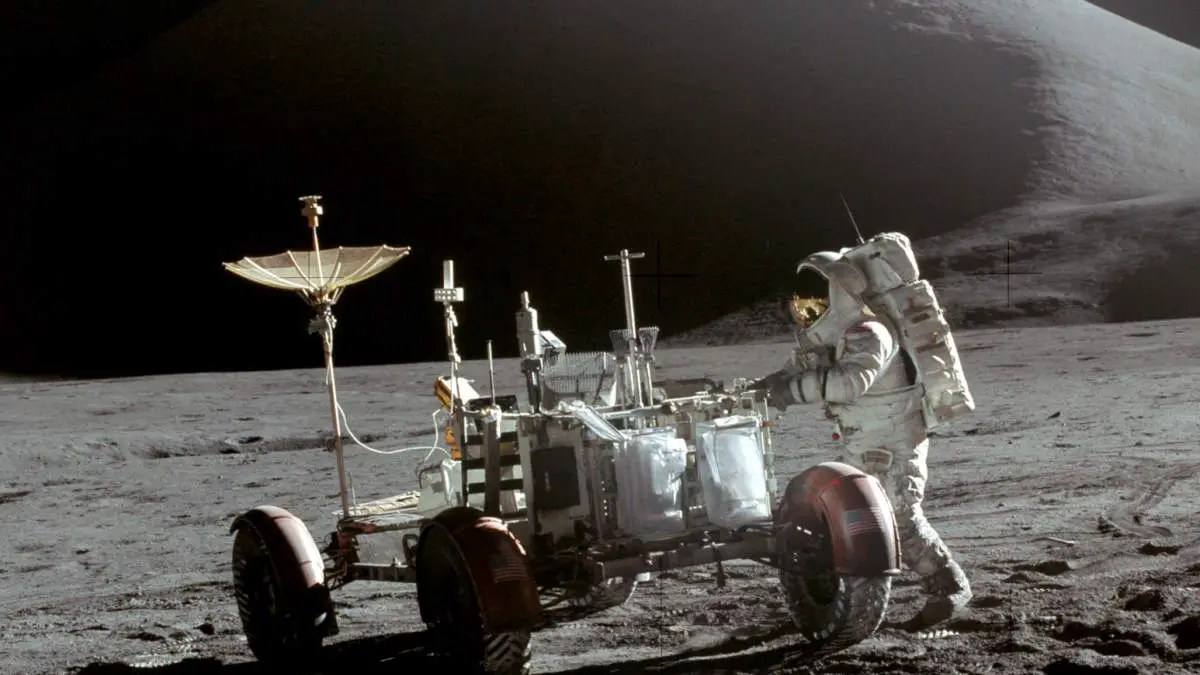
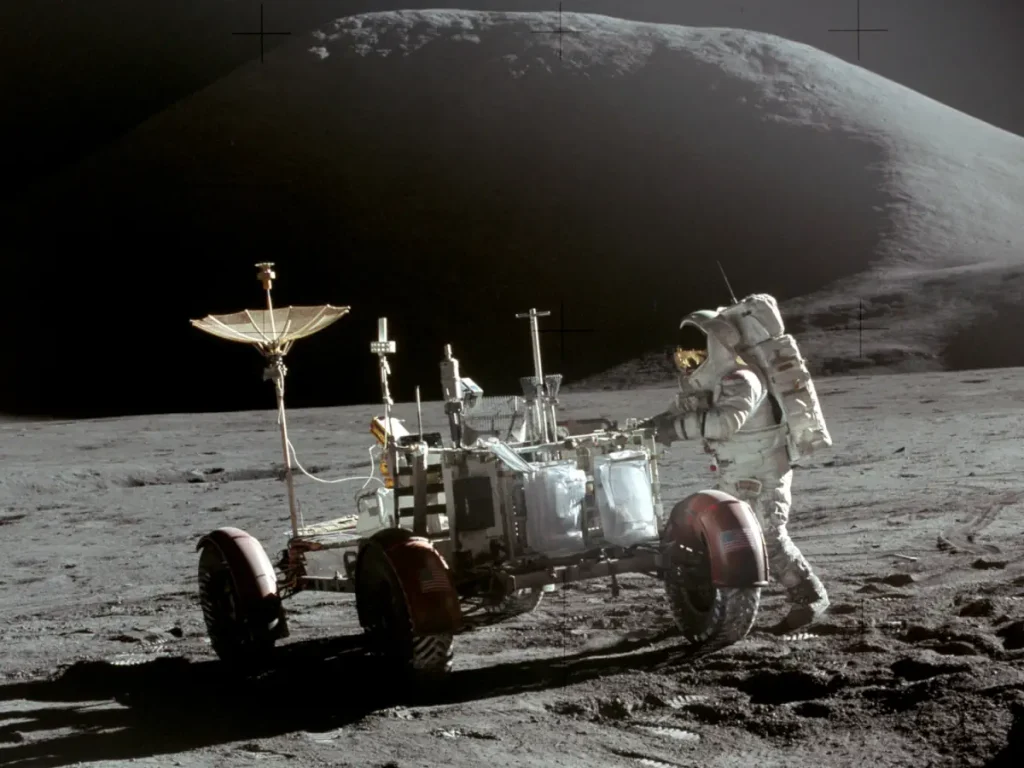
The Lunar Roving Vehicle (LRV), often referred to simply as the “moon buggy,” was used on the Moon in the last three missions of the American Apollo program (15, 16, and 17) between 1971 and 1972. Its first use was during the Apollo 15 mission, driven by astronauts David Scott and Jim Irwin on July 31, 1971.
July 31 story of what happened this day in Science, Technology, Astronomy, and Space Exploration history.
Development and Design of the Lunar Roving Vehicle
The idea for a lunar vehicle had been in circulation since the early planning stages of the Apollo program. The realization that astronauts’ mobility on the lunar surface was severely limited led to the concept of a vehicle that could traverse the Moon’s unique terrain.
NASA awarded the contract to build the LRV to Boeing, with significant contributions from General Motors’ Defense Research Laboratories. The project was challenging due to the stringent requirements for weight, reliability, and adaptability to the Moon’s harsh environment.
Design Considerations
Several crucial considerations went into the design of the LRV:
- Weight: One of the most significant challenges was minimizing the vehicle’s weight. Every extra pound required additional fuel for transport. The final design weighed only about 210 kilograms (460 pounds) on Earth, which translated to about 35 kilograms (77 pounds) in the Moon’s lower gravity.
- Mobility: The vehicle had to be able to navigate the uneven and unknown lunar terrain. The wheels were made of a flexible wire mesh with titanium chevrons for traction, filled with a resilient foam to provide support. This design allowed the wheels to conform to the shape of rocks and other obstacles.
- Power: The LRV was battery-powered, with two 36-volt silver-zinc potassium hydroxide non-rechargeable batteries. This provided enough energy for about 92 kilometers (57 miles) of driving.
- Navigation: The vehicle was equipped with a special navigation system that allowed the astronauts to keep track of their distance from the Lunar Module, ensuring they never ventured further than they could walk back in case of a breakdown.
- Stowage: The LRV had to be stowed compactly for transport to the Moon. It was folded and stored in the Lunar Module’s quadrant 1 bay, and the astronauts had to unfold and activate it once on the lunar surface.
- Durability: The lack of atmosphere on the Moon meant that the LRV had to withstand significant temperature extremes, from 120°C (248°F) in the sunlight to -160°C (-256°F) in the shade. Materials and lubricants had to be chosen and tested carefully to ensure they could handle these conditions.
- Controls and Ergonomics: The LRV was designed to be driven by astronauts in bulky spacesuits, so the controls were created to be simple and robust. It had a T-shaped hand controller to manage forward/reverse motion, steering, and braking.
Specifications of the Lunar Roving Vehicle
The Lunar Roving Vehicle had a mass of 210 kg (463 lbs) and was designed to hold a payload of an additional 490 kg on the lunar surface. The frame was 3.1 meters (10.1 feet) long with a wheelbase of 2.3 meters (7.5 feet). The maximum height was 1.14 meters (3.7 feet). The frame was made of aluminum alloy 2219 tubing welded assemblies and consisted of a 3-part chassis which was hinged in the center so it could be folded up and hung in the Lunar Module quad 1 bay.
It had two side-by-side foldable seats made of tubular aluminum with nylon webbing and aluminum floor panels. An armrest was mounted between the seats, and each seat had adjustable footrests and a velcro seatbelt. A large mesh dish antenna was mounted on a mast on the front center of the rover. The suspension consisted of a double horizontal wishbone with upper and lower torsion bars and a damper unit between the chassis and upper wishbone. Fully loaded the LRV had a ground clearance of 36 cm (14.17 inches).

The wheels of the Lunar Roving Vehicle consisted of a spun aluminum hub and an 81.8 cm diameter (32.2 inches), 23 cm wide (9.05 inches) tire made of zinc-coated woven 0.083 cm diameter (0.033 inches) steel strands attached to the rim and discs of formed aluminum. Titanium chevrons covered 50% of the contact area to provide traction. Inside the tire was a 64.8 cm diameter bump stop frame to protect the hub. Dust guards were mounted above the wheels.
Each wheel had its own electric drive, a DC series wound 0.25 hp motor capable of 10,000 rpm, attached to the wheel via an 80:1 harmonic drive, and a mechanical brake unit. Maneuvering capability was provided through the use of front and rear steering motors. Each series wound DC steering motor was capable of 0.1 hp. Both sets of wheels would turn in opposite directions, giving a steering radius of 3.1 meters, or could be decoupled so only one set would be used for steering.
Power was provided by two 36-volt silver-zinc potassium hydroxide non-rechargeable batteries with a capacity of 121 amp-hrs. These were used to power the drive and steering motors and also a 36-volt utility outlet mounted in front of the LRV to power the communications relay unit or the TV camera. Passive thermal controls kept the batteries within an optimal temperature range.
The design and development of the Lunar Roving Vehicle represent a significant engineering achievement. The ability to create a functional, reliable vehicle under such unique and demanding conditions is a testament to the innovation and creativity of the engineers and scientists involved in the Apollo program.
A T-shaped hand controller situated between the two seats controlled the four drive motors, two steering motors, and brakes. Moving the stick forward powered the LRV forward, left, and right turned the vehicle left or right, pulling backward activated the brakes. Activating a switch on the handle before pulling back would put the LRV into reverse. Pulling the handle all the way back activated a parking brake.
The control and display modules were situated in front of the handle and gave information on the speed, heading, pitch, power, and temperature levels. Navigation was based on continuously recording direction and distance through the use of a directional gyro and odometer and inputting this data to a computer which would keep track of the overall direction and distance back to the LM. There was also a Sun-shadow device that could give a manual heading based on the direction of the Sun, using the fact that the Sun moved very slowly in the sky.
Deployment of the LRV from the LM quad 1 by the astronauts was achieved with a system of pulleys and braked reels using ropes and cloth tapes. The rover was folded and stored in quad 1 with the underside of the chassis facing out. One astronaut would climb the egress ladder on the LM and release the rover, which would then be slowly tilted out by the second astronaut on the ground through the use of reels and tapes. As the rover was let down from the bay most of the deployment was automatic.
The rear wheels folded out and locked in place and when they touched the ground the front of the rover could be unfolded, the wheels deployed, and the entire frame let down to the surface by pulleys. The rover components are locked into place upon opening. Cabling, pins, and tripods would then be removed and the seats and footrests raised. After switching on all the electronics the vehicle was ready to back away from the LM.
Apollo 15 Mission and the first use of the Lunar Roving Vehicle
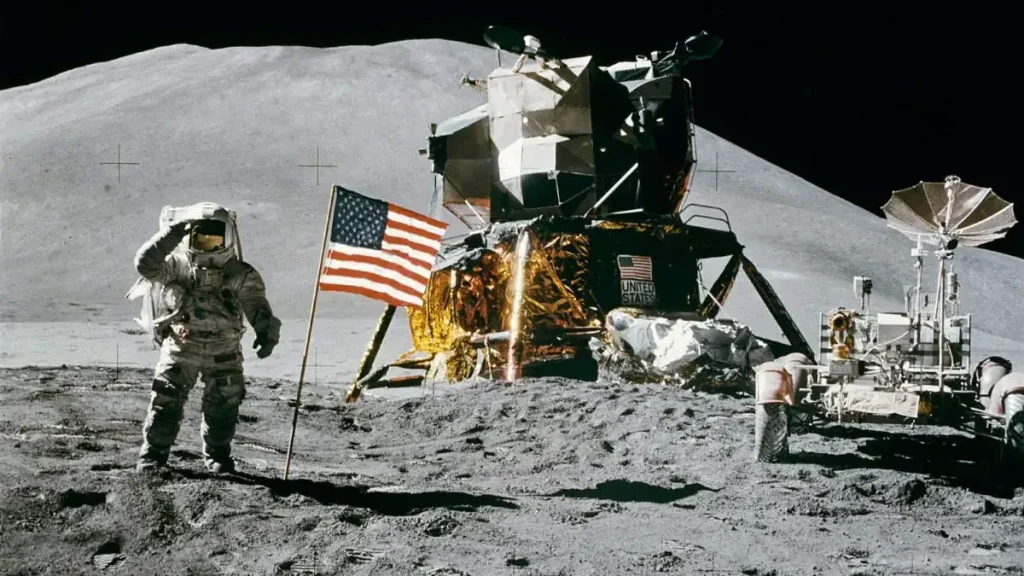
Apollo 15 was the fourth crewed mission to land on the Moon and marked the first use of the LRV. Commander David Scott (born June 6, 1932) and Lunar Module Pilot Jim Irwin (March 17, 1930 – August 8, 1991) spent three days on the lunar surface, and the LRV greatly expanded the range of their exploration.
On July 31, 1971, Scott and Irwin took the LRV on its maiden lunar drive. During this first expedition, they drove the LRV a total distance of 8 kilometers (5 miles) in about one hour and traversed to various scientific points of interest. The use of the LRV allowed them to collect samples and data from a much more extensive area than in previous missions.
Preparing the LRV
Upon landing on the lunar surface, astronauts David Scott and Jim Irwin had the task of deploying the Lunar Roving Vehicle, which was stowed in a folded position within the Lunar Module. They had to carefully unfold it and activate its systems. This process was meticulously rehearsed on Earth, but doing it on the Moon, in bulky spacesuits, presented unique challenges. The deployment went smoothly, and the LRV was ready for its maiden lunar drive.
First Expedition using the Lunar Roving Vehicle
The first use of the Lunar Roving Vehicle was for the mission’s first Extravehicular Activity (EVA). Scott and Irwin drove the LRV a total distance of around 8 kilometers (5 miles) in approximately one hour. The LRV’s first journey took them to the Elbow Crater and St. George Crater, locations carefully chosen for scientific interest.
Geological Observations
The primary purpose of the Lunar Roving Vehicle was to allow astronauts to collect rock and soil samples from a greater variety of locations. During this first expedition, Scott and Irwin were able to gather valuable samples and make important observations about the lunar terrain. They documented their findings with photographs and notes.
Experiencing the Lunar Drive
Both astronauts commented on the unique experience of driving on the Moon. The Lunar Roving Vehicle’s suspension system had to cope with the Moon’s lower gravity, leading to a bouncy ride. The mesh wheels kicked up lunar dust, and the vehicle’s behavior was unlike anything experienced on Earth. Despite this, they found the LRV to be highly maneuverable and robust.
Broadcasting to Earth
One of the iconic moments of this first Lunar Roving Vehicle journey was the live television broadcast. A camera mounted on the LRV allowed mission control and the world to watch parts of the lunar drive. This added a new dimension to space exploration, allowing people on Earth to vicariously experience the lunar landscape.
Significance
The successful first use of the Lunar Roving Vehicle on July 31, 1971, represented a new phase in lunar exploration. It dramatically extended the range and scope of scientific activities that astronauts could undertake on the lunar surface. The lessons learned and the data collected on this first drive laid the groundwork for more extensive exploration in subsequent Apollo missions.
Where are the Lunar Roving Vehicles now?
The Apollo 15 Lunar Roving Vehicle remains on the lunar surface, a lasting symbol of human exploration and technology. It, along with the LRVs from Apollo 16 and 17, can be seen in images captured by lunar orbiters, standing as silent monuments to a remarkable period in space exploration history.
Sources
- “This Week in NASA History: First Use of the Lunar Roving Vehicle – July 31, 1971” on the NASA History website
- “The Apollo 15 Lunar Rover on the Moon” on the NASA Starchild website
- Apollo 15 on Wikipedia
- Apollo 15 mission page on the NASA website
- The Apollo Lunar Roving Vehicle on the NASA website

- How Many Elephants are Left in the World in 2025? - August 17, 2025
- Moon Landings: All-Time List [1966-2025] - February 2, 2025
- What Is Max-Q and Why Is It Important During Rocket Launches? - January 16, 2025