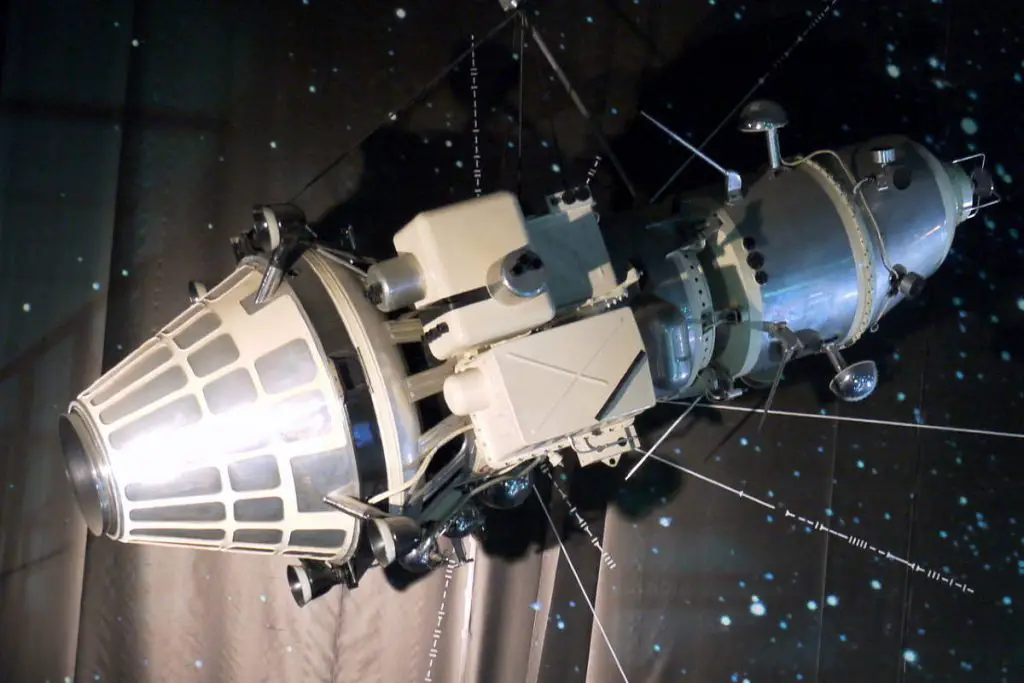
On November 10, 1970, the uncrewed Luna-17 spacecraft launched (see notes 1) and it delivered Lunokhod 1 to the lunar surface on November 17, 1970. Lunokhod 1 was the world’s first automatic self-propelled laboratory, fully controlled from Earth. With Lunokhod 1’s landing on the Moon, a new stage has begun in the exploration of the Earth’s only natural satellite by automatic devices.
November 17 story of what happened this day in Science, Technology, Astronomy, and Space Exploration history.
Lunokhod 1
Luna 17 delivered Lunokhod 1 (moonwalker 1 in Russian) on the lunar surface on 17 November 1970. The lunar rover broke many records: although only designed for a lifetime of three lunar days (approximately three Earth months), the lunar rover operated on the surface of the Moon for 11 lunar days (321 Earth days – exactly 301 days 06 hours 37 minutes) and traversed a total distance of 10.54 km (6.55 miles).
The self-propelled vehicle conducted research on the lunar surface and near-lunar space until September 1971.
Lunokhod 1 was created in the design bureau of the Khimki Machine-Building Plant and named after the aircraft designer Semyon Alekseevich Lavochkin (September 11, 1900 – June 9, 1960) (today – Scientific and Production Association named after S. A. Lavochkin, part of the State Corporation “Roscosmos“) under the leadership of Grigory Nikolaevich Babakin (13 November 1914 – 3 August 1971).
The self-propelled chassis for the Lunokhod was created at VNIITransMash under the leadership of the Soviet-Armenian mechanical engineer Alexander Leonovich Kemurdzhian (October 4, 1921 – February 25, 2003).
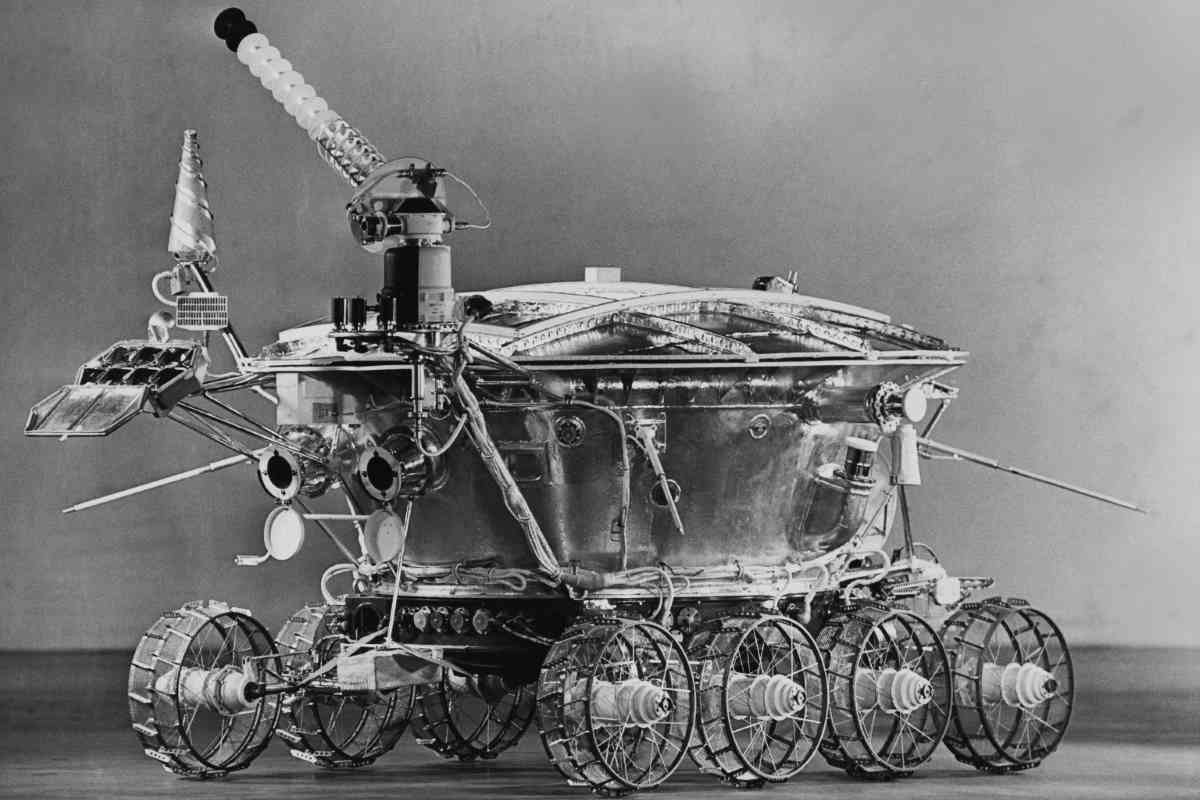
Lunokhod 1 was about 7.5 feet (2.3 meters) long and 5 feet (1.5 meters) tall. It consisted of two main parts: a wheeled chassis and a sealed instrument container, which houses all the service equipment. The container has the shape of a frustum cone, and the upper base of the cone, which serves as a radiator-cooler for heat dissipation, has a larger diameter than the lower one.
During the moonlit night, the radiator was covered with a lid. The inner surface of the cover is covered with solar cells, which provide recharging of the battery during a lunar day. In the working position, the solar panel can be positioned at different angles in the range of 0-180° in order to optimally use the energy of the Sun at its various heights above the lunar horizon.
To obtain panoramic images and photograph sections of the starry sky, the Sun, and the Earth, which are necessary for the Astro-orientation of the Lunokhod and do not require high image transmission rates, a telephotometric or photo-television optical-mechanical system with panoramic scanning, consisting of four cameras, was also installed onboard the Lunokhod.
They are located in such a way that two of them provide an overview of the terrain to the right and left of the Lunokhod within a little more than 180° in the horizontal plane and 30° in the vertical plane, and the other two cameras provide an image of the terrain and space within 360° in the vertical plane and 30° in horizontal planes.
Lunokhod 1 was controlled remotely. The remote control system included a heading system that provided information about the angular position of the vehicle to the Earth. In addition, the heading gyroscope provided movement in a given direction, taking into account obstacle avoidance.
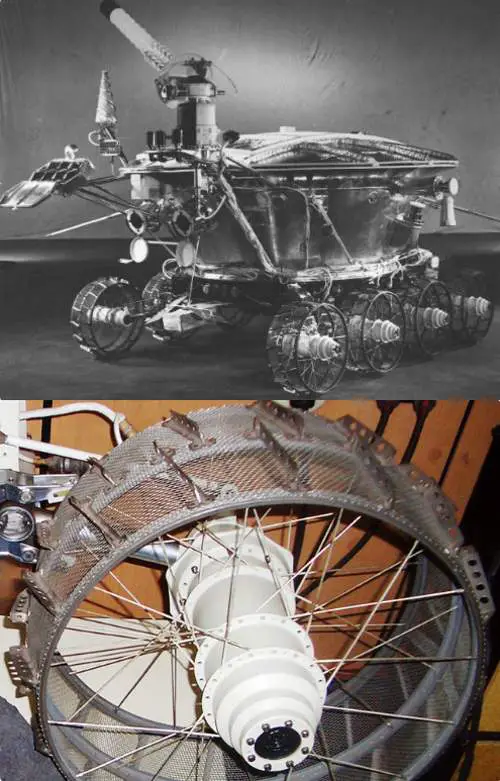
To obtain information about road conditions necessary to control the movement of the Lunokhod 1, about the distance traveled, and to conduct scientific experiments to study the properties of the soil, a passability assessment device, which is part of the self-propelled chassis, was installed at the stern of the Lunokhod.
It consisted of a measuring (ninth) wheel and mechanisms for introducing and rotating a stamp in the soil, which allows one to obtain information on the physical and mechanical properties of the lunar soil. The distance traveled was determined using a measuring wheel.
Lunokhod 1 (moonwalker 1 in Russian) was the first of two uncrewed lunar rovers landed on the Moon by the Soviet Union as part of its Lunokhod program. In 1970, it became the first remote-controlled robot “rover” to freely move across the surface of an astronomical object beyond the Earth (Lunokhod 0 was launched in February 1969 but failed to reach orbit).
Image courtesy: Serguei Matrossov
As a result of the survey by the Lunokhod 1 of the landing area of the Luna-17 station, the following were built:
- a topographic scheme of the track at a scale of 1: 1000
- refined schemes of individual sections at a scale of 1: 200
- topographic plans of individual sections at a scale of 1: 100, obtained by the stereo photographic method (stereoscopy, a technique for creating or enhancing the illusion of depth in an image), height profile trails, and characteristic craters.
During the entire period of the active existence of the Lunokhod, measurements of the physical and mechanical properties of the lunar soil were regularly carried out. Using the RIFMA automatic spectrometric equipment, information was obtained on the chemical composition of the lunar soil – it contained the following elements: silicon (20%), iron (12%), calcium (8%), aluminum (7%), magnesium (7 %), titanium (<4%) and potassium (<1%).
The self-propelled vehicle was controlled from the Lunokhod Control Center by the crew, which included the commander, driver, navigator, operator, and flight engineer. The crew of the Lunokhod, receiving lunar television images and telemetry information on Earth, with the help of a specialized control panel, provided commands to the Lunokhod.
Records were broken by Lunokhod 1 and Luna 17
The station “Luna-17” and Lunar rover Lunokhod 1 set the following records:
- The absolute world record for the duration of active existence on the lunar surface and a world record for the duration of active existence on the lunar surface in class “C”
- World record for the maximum mass of an automatic self-propelled vehicle on the lunar surface in class “C”(5,600 kilograms or 12,300 lb)
- World record for the total distance covered by a self-propelled vehicle on the lunar surface in class “C” (10.54 km or 6.55 miles)
- World record for the duration of active operations of a self-propelled vehicle on the lunar surface in class “C” (3,390 hours 36 minutes)

Driving distances of Lunokhod 1 by date
1970
- November 17 – 22: The rover drove 0.197 km (0.122 mi), and returned 14 close-up pictures of the Moon and 12 panoramic views, during 10 communication sessions. It also conducted analyses of the lunar soil.
- December 9 – 22: 1.522 km (0.945 mi)
1971
- January 8 – 20: 1.936 km (1.202 mi)
- February 8 – 19: 1.573 km (0.977 mi)
- March 9 – 20: 2.004 km (1.245 mi)
- April 8 – 20: 1.029 km (0.639)
- May 7 – 20: 0.197 km (0.122 mi)
- June 5 – 18: 1.559 km (0.969 mi)
- July 4 – 17: 0.220 km (0.137 mi)
- August 3 – 16: 0.215 km (0.134 mi)
- August 31 – September 14: 0.088 km (0.055 mi)
Total: 10.540 km (6.550 mi)
End of mission and results
Controllers finished the last communications session with Lunokhod 1 at 13:05 UT on September 14, 1971. Attempts to re-establish contact were finally discontinued, and Lunokhod 1’s operations officially ceased on October 4, 1971, the anniversary of Sputnik 1.
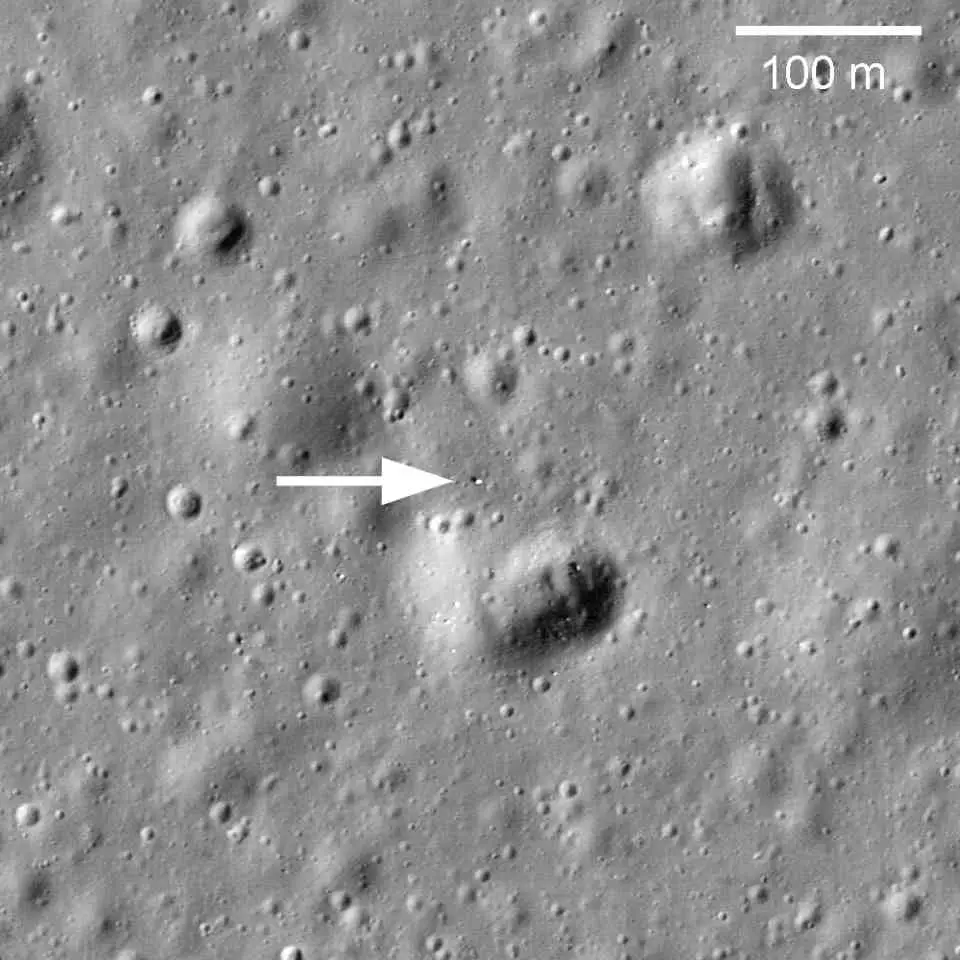
Discovery of Luna 17 landing site and Lunokhod 1’s final resting place
In March 2010, the Lunar Reconnaissance Orbiter photographed the landing site of Luna 17, showing the lander and tracks of the rover. In April 2010, the Apache Point Observatory Lunar Laser-ranging Operation team announced that with the aid of these photos, they had found the long-lost Lunokhod 1 rover and had received returns from the laser retroreflector.
Notes
1. Luna 17
Launched on November 10, 1970, Luna 17 was the uncrewed Soviet spacecraft that deployed the first robotic rover, Lunokhod 1 onto the surface of the Moon.

Sources
- Lunokhod 1: Half a century on the Moon on the Roscosmos official website
- Lunokhod 1 on Wikipedia
- Lunokhod 1 on the NASA website
- Luna 17 on Wikipedia

- How Many Elephants are Left in the World in 2025? - August 17, 2025
- Moon Landings: All-Time List [1966-2025] - February 2, 2025
- What Is Max-Q and Why Is It Important During Rocket Launches? - January 16, 2025